 手机直线:
手机直线: 咨询热线:0571-56211150
咨询热线:0571-56211150








通过模仿人手功能的技术装置称为机械手。机械手模仿着人手的关节动作,按预定设计程序、行动和期望达到自动抓放、挪动操作的自动机械装置。用于工业生产中的机械手称为工业机械手。机器人技术是集运动学,动力学理论、机械设计与制造技术、计算机硬件与软件技术、控制理论、电液伺服随动技术、传感器技术、人工智能理论等科学及技术领域的综合应用。
机械手是工业流水生产线中应用广泛的设备,可进行拾取、分流、包装等工作,在军用,民用等工业领域起着重要的作用。作为现代化工厂常用的工作机构,机械手极大地决定了流水线能否正常工作、高效运转的关键部件,机械手设计,优化的水平会直接影响工农业生产。夹取机械手是其中应用较为广泛的一类,在产品的设计阶段对机械手进行运动仿真,运动合理与否、工作机构各构件之间是否发生干涉可以直观地检测出来并及时修正。因此,机械手的优化设计及运动仿真具有重要的意义。基于对机械手优化设计及运动仿真的有限元分析研究,通过对机械手优化设计所需要的合理性进行了简单设计并修正。
CATIA是由法国达索公司研发的一款功能强大并广泛应用于三维实体建模、装配、有限元分析软件。与同类软件相比,CATIA的操作界面更加简洁明了,容易上手。并且具有强大的三维复杂曲面造型功能,能进行混合建模技术,使以往繁琐的建模过程更加灵活和高效。
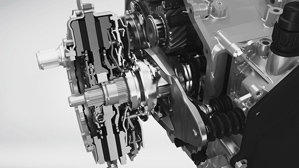
三维建模是虚拟分析的基础,模型的精细程度及尺寸关系直接影响后续工作。对机械手进行三维建模,其包括支撑臂俯仰臂、旋转臂两个夹手。如图1所示,底座起固定作用,支撑臂,转轴可360度旋转,俯仰臂及夹手旋转度数待分析。利用约束关系对其进行三维装配,将底座固定添加运动副关系,利用铰接运动副将其余零件组装起来,对可运动点添加角度驱动。如图1所示。
CATIA的运动分析模块中蕴涵了空间解析几何的数学原理,通过建立几何模型、定义运动学模型,采用运动仿真、运动轨迹、参数曲线等一些直观输出形式,就可以初步分析机构的运动特性,得出量化的结果。运动命令对机构进行初始仿真观察,理解各个单元运动目的。然后对其运动添加约束:利用规则与公式关系,使得两个夹手的角度相等:机械手\命令\命令\角度=机械手\命令\命令\角度在知识专家模块中,利用ROLL工具,进行简单编程:进入运动仿真工作台,用规则进行仿真,改变仿真步骤、时间参数,可以看到整体仿真效果。图示中设置步骤数为80,运行步骤如果过快,将无法看到具体效果。程序中各时间是实际测试修改最后的结果。如图所示。
对于复杂运动机构,可以通过机械装置的分析,明确各实体的命令及运动副关系,被选中对象在三维图中高亮显示。如图所示,该机械手含有5个驱动命令,5个运动副。
法则曲清晰地查询到各对象随时间的运动变化。如图所示。
为了观察关键点的运动特性,激活传感器与检测运动参数,图中检测3点的加速度,如图设置。得到如图的加速度曲线图。
专业从事机械产品设计│有限元分析│CAE分析│结构优化│技术服务与解决方案
hjc222黄金城官网
本文出自hjc222黄金城官网www.nataid.com,转载请注明出处和相关链接!